ROS Control
ros_control是通用Robot控制框架,用来连接ROS中应用和实际(仿真)机器人,它包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等,可以帮助机器人应用快速落地,提高开发效率。
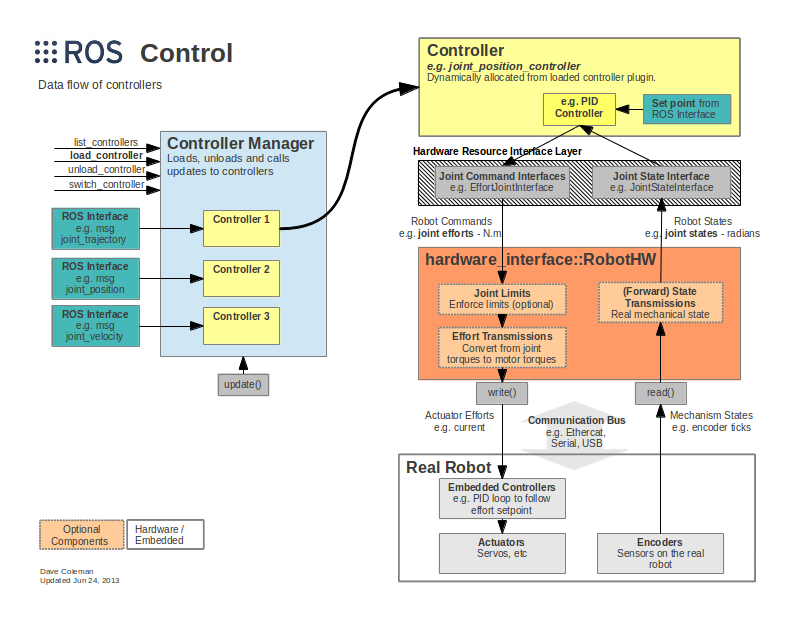
ros_control运行时,包括以下几个部分:
- Controller Manager:Manger管理了多个Controller,每个Controller代表一个上层ROS应用。
- Controller:Controller可以完成每个joint的控制,请求下层的硬件资源,并且提供了PID控制器,读取硬件资源接口中的状态,并发布控制命令。
- Hardware Rescource:抽象接口层
- RobotHW:硬件抽象层和硬件直接打交道,通过write和read方法来完成硬件的操作,这一层也包含关节限位、力矩转换、状态转换等功能。
下图是ros_control的数据流图:
目前,ros_control中提供了一些现成Controllers和Hardware Interface,用户可以根据需要自己定制这些插件。
其他概念
Transmissions
Transmissions就是机器人的传动系统,机器人每个需要运动的关节都需要配置相应的Transmission。
通常情况下Transmission的内容会在URDF文件中直接定义。用户定义Transmission内容时可以定义在单独的文件中,之后include到需要的URDF文件中。
目前,ROS提供的transmission类型包括:
- DifferentialTransmission
- FourBarLinkageTransmission
- SimpleTransmission
机械臂中一般只会用到SimpleTransmission。
以下是一个Joint的传动定义
1 | <transmission name="trans_name"> |
上述定义中,注意以下两点:
- hardwareInterface:Controller和RobotHw沟通的接口,基本上和controllers的种类是对应的(参考HardwareInterface类型)。
- actuator:??? 不知道用来干啥的???
Joint Limits
Joint Limits是RobotHW中的一块,维护一个关节限位的数据结构,包含关节速度、位置、加速度、加加速度、力矩等方面的限位,还包含安全作用的位置软限位、速度边界(k_v)和位置边界(k_p)等等。
Joint Limits可以直接定义在URDF文件中,可以通过YAML文件加载到ROS parameter server中,还可以使用joint_limits_interface在代码中定义。
Controller manager
Controller Manager可以加载、开始运行、停止运行、卸载不同的controller,并且提供了多种工具来完成这些操作。
命令行工具:
1 | rosrun controller_manager controller_manager <command> <controller_name> |
