Moveit 系统结构
Moveit!中最重要的模块是move_group节点,该节点起到接口整合,以及提供Action、Service的作用。
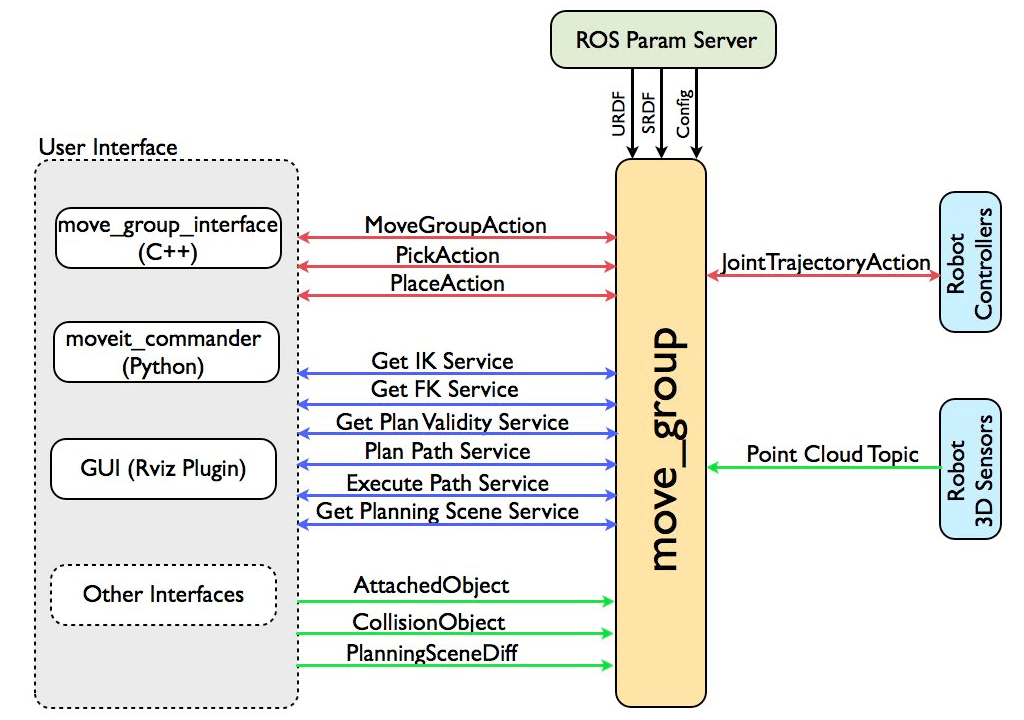
关于move_group有以下几点:
整合C++(move_group_interface)、Python(moveit_commander)、GUI接口(Rviz),提供Action、Service功能
从ROS Param Server加载URDF、SRDF、Moveit!以及其他配置
move_group节点通过ROS的topic和actions控制robot,告知其位置信息、点云信息、以及其他传感器数据
相关问题 下面的问题是阅读Concepts 后提炼出来的:
URDF文件如何定义?如何展示(gazebo、Rviz)?
SRDF文件包含哪些信息?详细了解SRDF文件文件内容?movit-setup-assistant 生成了哪些文件?这些文件有啥用途?
3. /joint_states 中的数据含义是啥?如何通过他控制机械臂动作?
4. robot_state_publisher 如何从/joint_states以及robot_description的URDF中计算TF?TF详细场景如何?
ros_control 如何工作?对hardwareInterface、actuator如何理解?
如何使用control?如何定义control?control如何工作?control中涉及的数据有哪些含义?怎么生成的?
move_group 和 robot_state_publisher、joint_state_publisher如何交互?
FollowJointTrajectoryAction 是啥?如何通过他控制机器人?
PlanRequestAdapters和montion_planner如何工作?如何发送Request?Response是什么样的?规划路径时如何添加限制条件?
PlanningScene中包含哪些东西?都有什么作用?
了解正/逆运动学原理?
了解如何进行碰撞检测?如何应用ACM矩阵?
运行UR5的movit! Demo 开源项目 - jontromanab/ur5_barrett_description
- jontromanab/ur5_barrett_bringup
- jontromanab/ur5_barrett_moveit仿真过程 Step 1: roslaunch ur5_barrett_bringup ur5_barrett_table_world.launch limited:=true
Step 2: roslaunch ur5_barrett_moveit ur5_barrett_moveit_planning_execution.launch limited:=true
Step 3: 运行下面的代码控制末端执行器
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 import sysimport PyKDLimport rospyimport moveit_commanderimport moveit_msgs.msgimport geometry_msgs.msgfrom math import pifrom std_msgs.msg import Stringfrom moveit_commander.conversions import pose_to_listif __name__ == "__main__" : moveit_commander.roscpp_initialize(sys.argv) rospy.init_node('control_ur5' , anonymous=True ) robot = moveit_commander.RobotCommander() scene = moveit_commander.PlanningSceneInterface() group_name = "manipulator" move_group = moveit_commander.MoveGroupCommander(group_name) display_trajectory_publisher = rospy.Publisher('/move_group/display_planned_path' , moveit_msgs.msg.DisplayTrajectory, queue_size=30 ) current_pose = move_group.get_current_pose() print("================= Before Pos ================= " ) print(current_pose) pose_goal = geometry_msgs.msg.Pose() rot = PyKDL.Rotation.Quaternion(current_pose.pose.orientation.x, current_pose.pose.orientation.y, current_pose.pose.orientation.z, current_pose.pose.orientation.w) print(rot.GetQuaternion()) rot.DoRotY(-pi/2 ) pose_goal.orientation = geometry_msgs.msg.Quaternion(*list(rot.GetQuaternion())) print(rot.GetQuaternion()) pose_goal.position.x = current_pose.pose.position.x pose_goal.position.y = current_pose.pose.position.y pose_goal.position.z = current_pose.pose.position.z move_group.set_pose_target(pose_goal) move_group.go(wait=True ) move_group.stop() print("================= Current Pos ================= " ) print(current_pose)
需要注意:
手臂长度有限,臂长大概是0.8m,离地高度大概是0.36m。如果输入的目标位置,不在这个范围内将会规划失败。指定目标点时,使用的是geometry_msgs/Pose参数,包含:
geometry_msgs/Point position:世界坐标系下(x,y,z)
geometry_msgs/Quaternion orientation:执行器转过的角度(绕x轴转动为手掌转动朝向不变,绕y,x轴转动为手掌不动,朝向变动)。
关于Geometry_Msgs.msg.Pose参考这个帖子
参考 moveit!中文参考资料